- Joined
- 30 December 2002
- Messages
- 232
I had the idea for years now and just never had the time or guts to start working on it but I figure if I don't post it I'll never get around to it. I'll be using GM etorque water cooled electric motor/generator to replace alternator for electric boost of about 70TQ, this also works as starter.
I have bigger idea later but I need to get my hands wet in to the electronic portion of this and learn how this all works together. I hope this will not be a big fail, getting it physically attached to the engine is the easy part the electronic part is the one that I'm little skeptical.
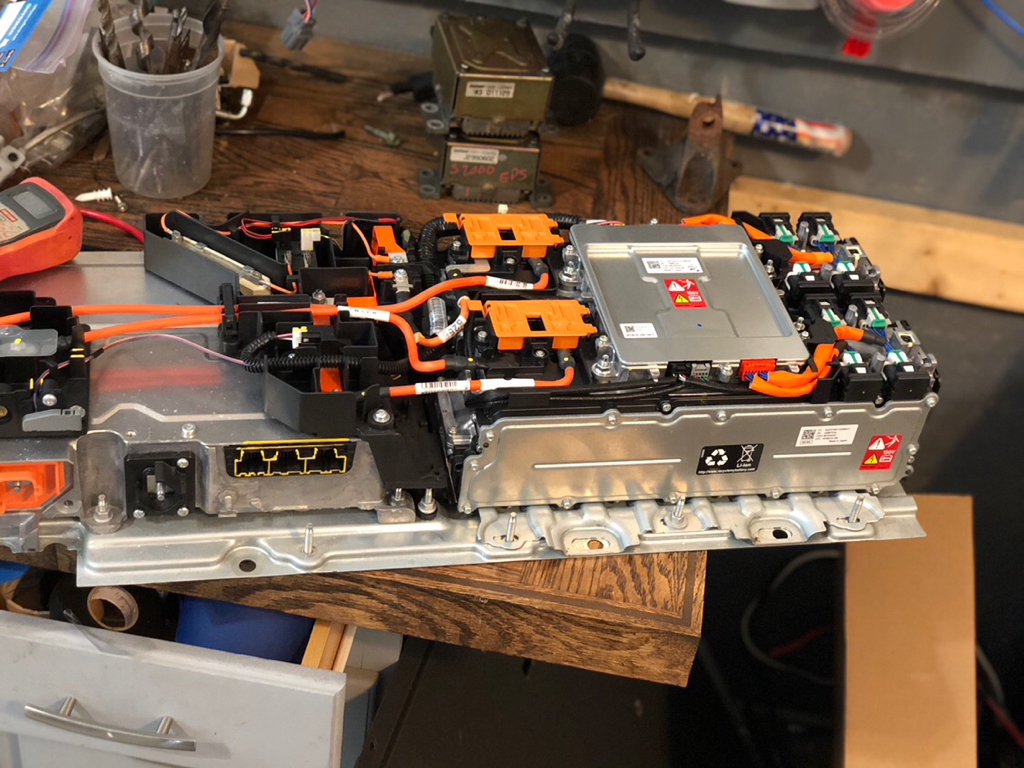
The battery pack has all the electronics needed and will fit nice in the trunk. On the right it has two air cooled lithium batteries totaling 130v. On top is the BMS (battery management system) that monitors temperature, volt etc to make sure all cells are distributed evenly. On left is the inverter and DC/DC converter. The DC/DC converter converts the volts down to 12v from 130v for car battery and accessories that run on 12v. The inverter runs the electric motor, that will also charge the lithium batteries on braking or if volts get below certain level. BMS is monitoring all the conditions. The nice thing about electric motors is you get full TQ from 0rpms. My engine is all bone stock NA J32 and it will stay this way, I'm not planning on getting it boosted with turbo or supercharger. I think the electric motors are the future like it or not. If anyone knows someone that works with canbus let me know") I think the first step would be to get canbus module to start communicating with battery pack, all suggestions are welcome as this is very early in this build and I don't know where this will go.
I think the first step would be to get canbus module to start communicating with battery pack, all suggestions are welcome as this is very early in this build and I don't know where this will go.
Pic of oem alternator next to this electric motor generator.

Thx,
David
I have bigger idea later but I need to get my hands wet in to the electronic portion of this and learn how this all works together. I hope this will not be a big fail, getting it physically attached to the engine is the easy part the electronic part is the one that I'm little skeptical.
The battery pack has all the electronics needed and will fit nice in the trunk. On the right it has two air cooled lithium batteries totaling 130v. On top is the BMS (battery management system) that monitors temperature, volt etc to make sure all cells are distributed evenly. On left is the inverter and DC/DC converter. The DC/DC converter converts the volts down to 12v from 130v for car battery and accessories that run on 12v. The inverter runs the electric motor, that will also charge the lithium batteries on braking or if volts get below certain level. BMS is monitoring all the conditions. The nice thing about electric motors is you get full TQ from 0rpms. My engine is all bone stock NA J32 and it will stay this way, I'm not planning on getting it boosted with turbo or supercharger. I think the electric motors are the future like it or not. If anyone knows someone that works with canbus let me know
I think the first step would be to get canbus module to start communicating with battery pack, all suggestions are welcome as this is very early in this build and I don't know where this will go.Pic of oem alternator next to this electric motor generator.
Thx,
David
Last edited:


